Semantic Segmentation with Dense Prediction Transformers via Grasshopper
The Ambrosinus-Toolkit v1.2.9 has been implemented with Semantic Segmentation a new DPT tool, following the inspiration from René Ranftl’s research at Intel. It is another AI tool that brings artificial intelligencepower inside the Grasshopper platform and completes (for now) my original idea to include DPT technology into ATk.
Dense Prediction Transformers (DPT) are a deep learningarchitecture utilized in computer vision applications like semantic segmentation, object detection, and instance segmentation. The fundamental concept of DPT involves generating dense image labels through the incorporation of global and local context information. An extensive explanation of AmbrosinusToolkit and the integration of the AI Diffuse Models in the AECcreativedesign processes has been discussed in the official research document within the Coding Architecture book chapter 😉. DPT represents an advanced architecture in the field of visual processing, which breaks away from traditional convolutional networks (CNN) to embrace transformers, known for their effectiveness in processing sequential data. These models are particularly well suited for dense prediction tasks, such as monocular depth estimation and semantic segmentation, due to their ability to handle high-resolution representations and capture global contexts within images. Combining token representations at different resolutions and using a convolutional decoder to synthesize full-resolution predictions allows DPTs to provide more precise and detailed results. This technology has already been shown to significantly improve performance in various computer vision tasks, setting new benchmarks in the field. Imagine you need to label objects in an image. Here’s how they work:
Convolutional Networks (CNN):CNNs are like artists who specialize in analyzing specific parts of the image. They scan the image with filters to detect edges, textures and shapes. Example: If they see a car, they might say: “There’s a car!”.
Dense Prediction Transformers (DPT): DPTs are like poetry writers who understand the image as a whole. They look at the image and create a detailed map of what they see. Example: If they see a road, they might say: “This is an asphalt road, with trees on the sides and a parked car.”
In short, CNNs focus on specific parts, while DPTs understand the image as a whole.
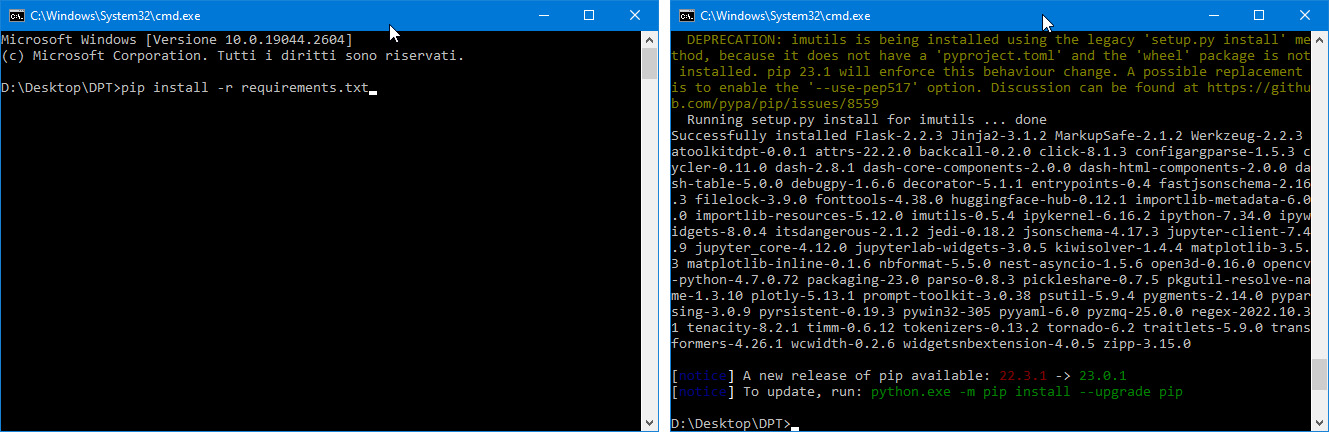
Requirements To run the DPTSemSeg component (subcategory AI) some Python libraries are necessary as the other AI tools, for this reason, I have shared a “requirements.txt”file allowing the designer in this step in a unique command line from cmd.exe (Windows OS side). After downloading the file to a custom folder (I suggest in C:/CustomFolder or something like that) run the following command from cmd.exe after logging in the “CustomFolder”: pip install -r requirements.txtand wait till you see the start prompt string (see the image below on the right).
If you have already used/installed DPTto3D component follow this instruction From your CMD window viewport, you can simply launch this command: pip install atoolkitdpt (I recommend this option) – in this way, all necessary (MiDaS and DPT) libraries will be installed on your machine. For a clean installation you can uninstall the previous version in this way from CMD window viewport: pip uninstall atoolkitdpt .
In particular, I have created the atoolkitdpt python library to run DPT estimation and the Semantic Segmentation. I have added all the MiDaS and Dense Prediction Transformers functions developed by Intelligent Systems Lab Org (Intel Labs) to atoolkitdpt 0.0.2library. In this way, I have integrated the possibility to exploit the MiDaS pre-trained dataset and the DPT large and hybrid datasets shared by Intel researchers directly inside Grasshopper. For this reason, this Python package is available directly from my PyPI repository page at this link. All future updates will be publicly notified on my GitHub page AToolkitDpt. Fundamental is downloading these 2 weights models (dpt_large_ade20k ~1.3GB and dpt-hybrid_ade20k ~400MB) shared by Intel researchers. These pre-trained datasets can generate segmented images (see the GitHub page aforementioned for details). Finally, the GH CPython is still necessary for running the “DPTSemSeg” component properly, as for all the other AI tools coded in Python language.
What is ADE20K trained dataset? The ADE20K dataset is a large-scale semantic segmentation dataset used for computer vision research. It comprises more than 27,000 images from the SUN and Places databases. Here are some key details about ADE20K:
Annotations: Images are fully annotated with pixel-level objects and object parts labels.
Object Categories: The dataset spans over 3,000 object categories, including both stuff (e.g., sky, road, grass) and discrete objects (e.g., person, car, bed). The Intel Labs has used an ADE20k model of 150 classes.
Additional Information: Many images also contain object parts and parts of parts.
Anonymization: Faces and license plates are blurred in the images.
Structure: Each image has associated annotations, including pixel-wise object and instance information.
Main features The DPTSemSeg component, utilizing DPT technology, can perform semantic segmentation directly from a 2D RGB image. The ADE20k dataset includes 150 classes (label IDs), and a common issue is the identical color palette used for two specific categories: road and skyscraper. I have implemented an internal prediction re-mapping to address this issue (hopefully successfully). However, the detection of skyscraper classes remains imperfect, as they are only partially recognized and often conflated with the building category (which is not too problematic, in my opinion). Summarizing the component can:
Generate the segmented image overlay on the original BaseIMG
Setting the “Optimize” option to false may correct the greyish image produced by the model (alternatively, the dpt-hybrid model can be used, though it is less accurate)
Generate a TXT file containing all data extracted from the segmented image, such as RGB colors, the percentage of the classes detected, and label IDs. This file will be saved in the “DirPath” folder.
Contents of the "DirPath" folder after a couple of test
We use cookies on our website to give you the most relevant experience by remembering your preferences and repeat visits. By clicking “Accept All”, you consent to the use of ALL the cookies. However, you may visit "Cookie Settings" to provide a controlled consent.
This website uses cookies to improve your experience while you navigate through the website. Out of these, the cookies that are categorized as necessary are stored on your browser as they are essential for the working of basic functionalities of the website. We also use third-party cookies that help us analyze and understand how you use this website. These cookies will be stored in your browser only with your consent. You also have the option to opt-out of these cookies. But opting out of some of these cookies may affect your browsing experience.
Necessary cookies are absolutely essential for the website to function properly. These cookies ensure basic functionalities and security features of the website, anonymously.
Cookie
Durata
Descrizione
cookielawinfo-checkbox-analytics
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Analytics".
cookielawinfo-checkbox-functional
11 months
The cookie is set by GDPR cookie consent to record the user consent for the cookies in the category "Functional".
cookielawinfo-checkbox-necessary
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookies is used to store the user consent for the cookies in the category "Necessary".
cookielawinfo-checkbox-others
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Other.
cookielawinfo-checkbox-performance
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Performance".
viewed_cookie_policy
11 months
The cookie is set by the GDPR Cookie Consent plugin and is used to store whether or not user has consented to the use of cookies. It does not store any personal data.
Functional cookies help to perform certain functionalities like sharing the content of the website on social media platforms, collect feedbacks, and other third-party features.
Performance cookies are used to understand and analyze the key performance indexes of the website which helps in delivering a better user experience for the visitors.
Analytical cookies are used to understand how visitors interact with the website. These cookies help provide information on metrics the number of visitors, bounce rate, traffic source, etc.
Advertisement cookies are used to provide visitors with relevant ads and marketing campaigns. These cookies track visitors across websites and collect information to provide customized ads.
Other uncategorized cookies are those that are being analyzed and have not been classified into a category as yet.
Interested in my works? see *About Me* section and contact me by email and/or by social
Subscribe to Ambrosinus DEV Newsletters
LA Arch | C+E Design | R&DEV Consultancy
This service will solely serve the purpose of informing subscribers about updates and relevant activities of LA Consultancy, developments related to the Grasshopper AmbrosinusToolkit plugin, scientific publications, outreach articles, noteworthy events and new content published on lucianoambrosini.it